伺服電機究竟是怎樣作業的?
什么是
伺服電機
伺服電機(servo motor )是指在伺服體系中操控機械元件作業的發動機,是一種補助馬達直接變速設備。
伺服電機作業原理
伺服首要靠脈沖來定位,根本上能夠這樣理解,
伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度,然后完成位移。
因為,
伺服電機自身具有宣布脈沖的功用,所以
伺服電機每旋轉一個角度,都會宣布對應數量的脈沖,這樣,和
伺服電機接受的脈沖構成了呼應,或許叫閉環,如此一來,體系就會知道發了多少脈沖給
伺服電機,一起又收了多少脈沖回來,這樣,就能夠很精確的操控電機的滾動,然后完成精確的定位,能夠到達0.001mm。
一、溝通伺服電動機溝通伺服電動機定子的結構根本上與電容分相式單相異步電動機類似.其定子上裝有兩個方位互差90°的繞組,一個是勵磁繞組Rf,它一向接在溝通電壓Uf上;另一個是操控繞組L,聯接操控信號電壓Uc。所以溝通伺服電動機又稱兩個伺服電動機。 溝通伺服電動機的轉子一般做成鼠籠式,但為了使伺服電動機具有較寬的調速規模、線性的機械特性,無“自轉”現象和快速呼應的功用,它與一般電動機比較,應具有轉子電阻大和滾動慣量小這兩個特征。現在運用較多的轉子結構有兩種形式:一種是選用高電阻率的導電資料做成的高電阻率導條的鼠籠轉子,為了減小轉子的滾動慣量,轉子做得細長;另一種是選用鋁合金制成的空心杯形轉子,杯壁很薄,僅0.2-0.3mm,為了減小磁路的磁阻,要在空心杯形轉子內放置固定的內定子.空心杯形轉子的滾動慣量很小,反應敏捷,并且作業平穩,因而被廣泛選用。 溝通伺服電動機在沒有操控電壓時,定子內只有勵磁繞組發作的脈動磁場,轉子靜止不動。當有操控電壓時,定子內便發作一個旋轉磁場,轉子沿旋轉磁場的方向旋轉,在負載恒定的情況下,電動機的轉速隨操控電壓的巨細而改變,當操控電壓的相位相反時,伺服電動機將回轉。 溝通伺服電動機的作業原理與分相式單相異步電動機盡管類似,但前者的轉子電阻比后者大得多,所以伺服電動機與單機異步電動機比較,有三個顯著特征: 1、起動轉矩大 因為轉子電阻大,其轉矩特性曲線如圖3中曲線1所示,與一般異步電動機的轉矩特性曲線2比較,有明顯的差異。它可使臨界轉差率S0>1,這樣不只使轉矩特性(機械特性)更挨近于線性,并且具有較大的起動轉矩。因而,當定子一有操控電壓,轉子當即滾動,即具有起動快、靈敏度高的特征。 2、作業規模較廣 3、無自轉現象 正常作業的伺服電動機,只要失掉操控電壓,電機當即中止作業。當伺服電動機失掉操控電壓后,它處于單相作業狀態,因為轉子電阻大,定子中兩個相反方向旋轉的旋轉磁場與轉子效果所發作的兩個轉矩特性(T1-S1、T2-S2曲線)以及組成轉矩特性(T-S曲線) 溝通伺服電動機的輸出功率一般是0.1-100W。當電源頻率為50Hz,電壓有36V、110V、220、380V;當電源頻率為400Hz,電壓有20V、26V、36V、115V等多種。 溝通伺服電動機作業平穩、噪音小。但操控特性對錯線性,并且因為轉子電阻大,損耗大,功率低,因而與同容量直流伺服電動機比較,體積大、分量重,所以只適用于0.5-100W的小功率操控體系。
二、直流
伺服電機
直流
伺服電機速度操控原理圖
直流
伺服電機分為有刷和無刷電機。有刷電機本錢低,結構簡略,發動轉矩大,調速規模寬,操控簡略,需求保護,但保護便利(換碳刷),發作電磁攪擾,對環境有要求。因而它能夠用于對本錢敏感的一般工業和民用場合。 無刷電機體積小,分量輕,出力大,呼應快,速度高,慣量小,滾動滑潤,力矩安穩。操控雜亂,簡略完成智能化,其電子換相辦法靈活,能夠方波換相或正弦波換相。電機免保護,功率很高,作業溫度低,電磁輻射很小,長壽命,可用于各種環境。 2.溝通
伺服電機也是無刷電機,分為同步和異步電機,現在運動操控中一般都用同步電機,它的功率規模大,能夠做到很大的功率。大慣量,最高滾動速度低,且跟著功率增大而快速降低。因而適合做低速平穩作業的運用。 3.
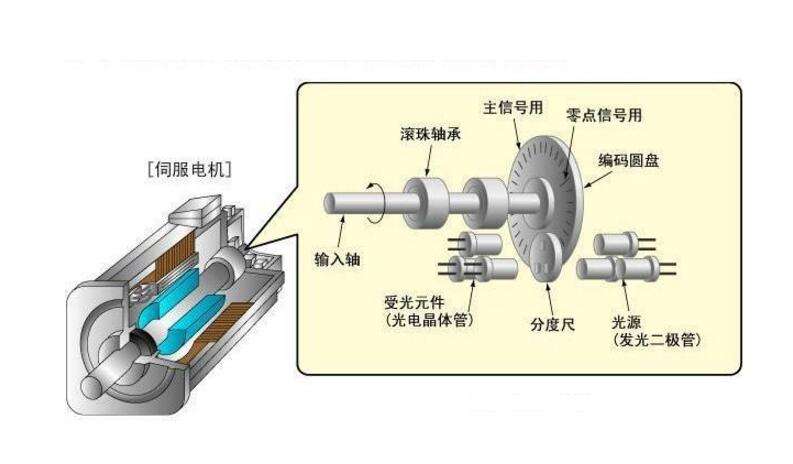
伺服電機內部的轉子是永磁鐵,驅動器操控的U/V/W三相電構成電磁場,轉子在此磁場的效果下滾動,一起電機自帶的編碼器反應信號給驅動器,驅動器根據反應值與目標值進行比較,調整轉子滾動的角度。
伺服電機的精度決定于編碼器的精度(線數)。
三、簡略
伺服電機的作業原理
伺服電機作業原理_電路圖
伺服電動機的作業原理及效果:
伺服電機的效果是驅動操控目標。被控目標的轉距和轉速受信號電壓操控,信號電壓的巨細和極性改動時,電機的滾動速度和方向也跟著改變。
伺服電動機分類:
溝通伺服電動機和直流伺服電動機。
溝通伺服電動機:
原理與兩相溝通異步電機相同,定子上裝有兩個繞組—勵磁繞組和操控繞組。
勵磁繞組和操控繞組在空間相隔90°。
接線:
勵磁繞組的接線 操控繞組的接線
勵磁繞組中串聯電容C的意圖是為了發作兩相旋轉磁場。
恰當挑選電容的巨細,可使通入兩個繞組的電流相位差挨近90°,因而便發作旋轉磁場,在旋轉磁場的效果下,轉子便滾動起來。
例:挑選電容,可使溝通
伺服電機電路中的電壓電流的相量關系如圖所示。
1)U2= 0 時,轉子中止。
這時,盡管U2 =0V,U1仍存在,似乎成單相作業狀態,但和單相異步機不同。若單相電機發動作業后,呈現單相后仍轉。
伺服電機不同,單相電壓時設備不能轉。
原因:溝通
伺服電機 R2規劃得較大。所以在U2=0時,溝通
伺服電機的T=f(s)曲線如下頁圖:
溝通伺服電動機的T=f(s)曲線(U2=0時)
當U2=0V時,脈動磁場分成的正反向旋轉磁場發作的轉距T'、T" 的組成轉矩T與單相異步機不同。組成轉矩的方向與旋轉方向相反,所以電機在U2=0V時,能當即中止,體現了操控信號的效果(有操控電壓時滾動,無操控電壓時不轉),以免失控。
(2)溝通
伺服電機R2規劃得較大,使Sm>1,Tst大,發動敏捷,安穩作業規模大。
(3)操控電壓U2巨細改變時,轉子轉速相應改變,轉速與電壓U2成正比。U2的極性改動時,轉子的轉向改動。
溝通伺服電動機的機械特性曲線( U1=co
nst )
運用
溝通
伺服電機的輸出功率一般為0.1-100W,電源頻率分50Hz、400Hz等多種。它的運用很廣泛,如用在自動操控、溫度自動記錄等體系中。
直流伺服電動機
結構:與直流電動機根本相同。為減小滾動慣量做得細長一些。
作業原理:與直流電動機相同。
供電辦法:他勵。勵磁繞組和電樞由兩個獨立電源供電:
U1為勵磁電壓,U2為電樞電壓。
由機械特性可知:
(1)U1(即磁通¢)不變時,必定的負載下,U2↑,n↑。
(2)U2=0時,電機當即停轉。
回轉:電樞電壓的極性改動,電機回轉。
運用:
直流
伺服電機的特性較溝通
伺服電機硬。經常用在功率稍大的體系中,它的輸出功率一般為1-600W。它的用處很多,如隨動體系中的方位操控等。
伺服電機在工業機器人中的運用
機器人工業的增加如火如荼,遍地開花,很多機床廠家、伺服廠家和其他有條件的企業都紛繁轉向機器人市場。為何機床廠家和伺服廠家如此活躍轉型研制機器人?工業機器人有4大組成部分,分別為本體,伺服,減速器和操控器。
步進電機用于驅動機器人的關節,要求是要有最大功率質量比和扭矩慣量比、高發動轉矩、低慣量和較寬廣且滑潤的調速規模。
機器人工業強大,需求在伺服、集成操控等范疇相繼取得突破才干成行。現在,我國在伺服等范疇依然處于待突破階段,對本土機器人工業造成不利影響。
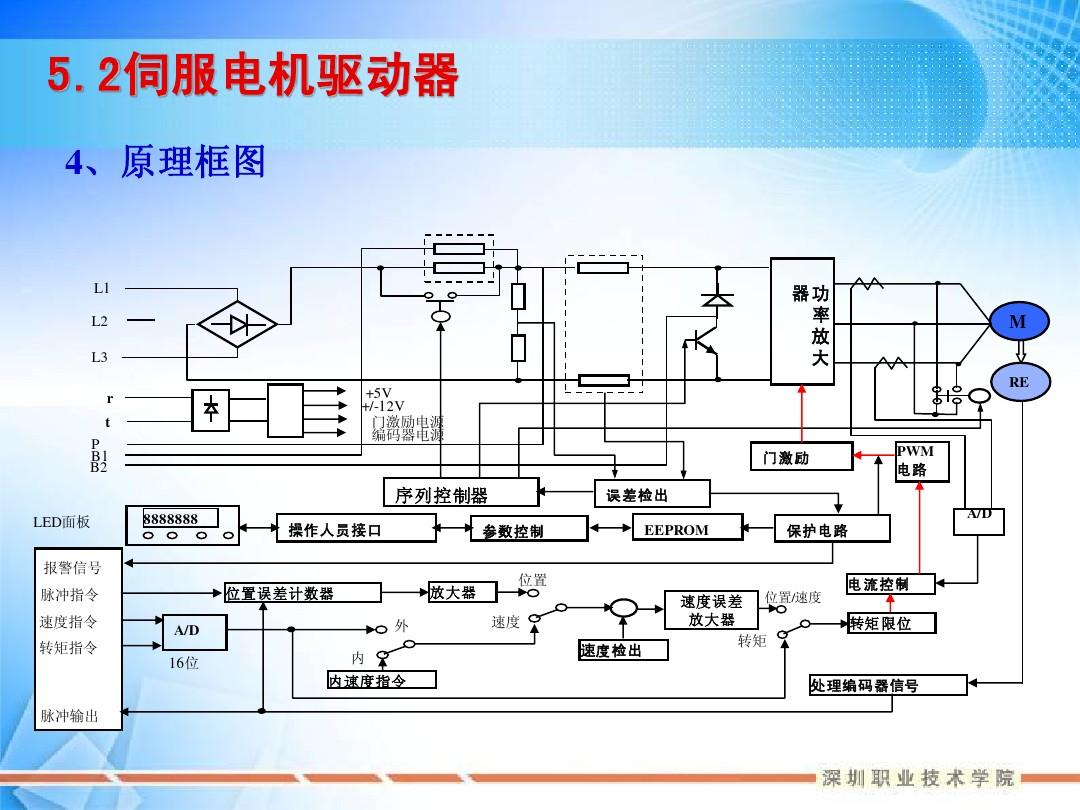
工業機器人電動伺服體系的一般結構為三個閉環操控,即電流環、速度環和方位環。一般情況下,關于溝通伺服驅動器,可經過對其內部功用參數進行人工設定而完成方位操控、速度操控、轉矩操控等多種功用。
工業自動化進程的持續推動,關于自動化軟件及硬件設備的需求都居高不下,其中國內工業機器人的市場一向穩步增加,估計在2015我國成為全球最大需求市場。
與此一起,直接帶動伺服體系的市場需求。美萊克供應的鳴志步進
伺服電機體系在集成式電機中完美融入了伺服操控技能,具有精度高、安穩性好、速度快等特征。
現在,因為高發動轉矩、大轉矩、低慣量的交、直流
伺服電機在工業機器人中得到廣泛的運用。其他電機,如溝通
伺服電機、步進電機根據不同的運用需求也會運用到工業機器人中。
特別是像機器人末端執行器(手爪)應選用體積、質量盡可能小的電機,尤其是要求快速呼應時,
伺服電機必須具有較高的可靠性,并且有較大的短時過載能力。具體運用要求:
快速性。
發動轉矩慣量比大。
操控特性的接連性和直線性,跟著操控信號的改變,電機的轉速能接連改變,有時還需轉速與操控信號成正比或近似成正比。
調速規模寬。
體積小、質量小、軸向尺度短。
能經受得起嚴苛的作業條件,可進行十分頻頻的正反向和加減速作業,并能夠在短時間內接受過載。
伺服電機職業未來趨勢
現代溝通伺服體系,在閱歷了從模仿到數字化的改變后,其內部數字操控環現已無處不在,比方換相、電流、速度和方位操控等;其完成首要經過新式功率半導體器材,像高功用DSP加FPGA、乃至伺服專用模塊也家常便飯。且新的功率器材或模塊每2~2.5年就會更新一次,新的軟件算法也日新月異,世界廠商的伺服產品大約每5年亦會更新換代——總而言之,產品生命周期越來越短,改變越來越快。總結國內外伺服廠家的技能道路和產品道路,結合市場需求的改變,能夠看到以下一些
伺服電機體系的最新展開趨勢:
高功率化
盡管高效化一向都是伺服體系重要的展開課題,但是仍需求繼續加強。首要包含電機自身的高功率:比方永磁資料功用的改進和更好的磁鐵設備結構規劃;也包含驅動體系的高功率化:包含逆變器驅動電路的優化,加減速運動的優化,再生制動和能量反應以及更好的冷卻辦法等。
直接驅動
直接驅動包含選用盤式電機的轉臺伺服驅動和選用直線電機的線性伺服驅動,因為消除了中心機械傳動設備的(如齒輪箱)傳遞誤差,然后完成了高速化和高定位精度。而直線電機簡略改動形狀的特征能夠使選用線性直線機構的各種設備完成小型化和輕量化。
高速、高精、高功用化
選用更高精度的編碼器,更高采樣精度和數據位數、速度更快的DSP,無齒槽效應的高功用旋轉電機、直線電機,以及運用自適應、人工智能等各種現代操控戰略,不斷將伺服體系的基礎目標(操控速度、操控精度)進步。
一體化和集成化
電動機、反應、操控、驅動、通訊的縱向一體化成為當時小功率伺服體系的一個展開方向。有時我們稱這種集成了驅動和通訊的電機叫智能化電機,有時我們把集成了運動操控和通訊的驅動器叫智能化伺服驅動器。電機、驅動和操控的集成使三者從規劃、制作到作業、保護都更緊密地融為一體。但是這種辦法面對更大的技能應戰和工程師運用習慣的應戰,因而很難成為干流,在整個伺服市場中是一個很小的有特征的部分。
通用化
通用型驅動器裝備有很多的參數和豐厚的菜單功用,便于用戶在不改動硬件裝備的條件下,便利地設置成V/F操控、無速度傳感器開環矢量操控、閉環磁通矢量操控、永磁無刷溝通伺服電動機操控及再生單元等五種作業辦法,適用于各種場合,能夠驅動不同類型的電機,比方異步電機、永磁同步電機、無刷直流電機、步進電機,也能夠適應不同的傳感器類型乃至無方位傳感器。能夠運用電機自身裝備的反應構成半閉環操控體系,也能夠經過接口與外部的方位或速度或力矩傳感器構成高精度全閉環操控體系。
智能化
現代溝通伺服驅動器都具有參數記憶、毛病自確診和剖析功用,絕大多數進口驅動器都具有負載慣量測定和自動增益調整功用,有的能夠自動辨識電機的參數,自動測定編碼器零位,有些則能自動進行振動抑止。將電子齒輪、電子凸輪、同步跟蹤、插補運動等操控功用和驅動結合在一起,關于伺服用戶來說,則供給了更好的體驗。
網絡化和模塊化
將現場總線和工業以太網技能、乃至無線網絡技能集成到伺服驅動器當中,現已成為歐洲和美國廠商的常用做法。現代工業局域網展開的重要方向和各種總線標準競爭的焦點就是怎么適應高功用運動操控對數據傳輸實時性、可靠性、同步性的要求。跟著國內對大規模分布式操控設備的需求上升,高級數控體系的開發成功,網絡化數字伺服的開發現已成為燃眉之急。模塊化不只指伺服驅動模塊、電源模塊、再生制動模塊、通訊模塊之間的組合辦法,并且指伺服驅動器內部軟件和硬件的模塊化和可重用。
從毛病確診到預測性保護
跟著機器安全標準的不斷展開,傳統的毛病確診和保護技能現已掉隊,最新的產品嵌入了預測性保護技能,使得人們能夠經過Internet及時了解重要技能參數的動態趨勢,并采取預防性措施。比方:關注電流的升高,負載改變時評估尖峰電流,外殼或鐵芯溫度升高時監視溫度傳感器,以及對電流波形發作的任何畸變保持警惕。
專用化和多樣化
盡管市場上存在通用化的伺服產品系列,但是為某種特定運用場合專門規劃制作的伺服體系舉目皆是。利用磁性資料不同功用、不同形狀、不同外表粘接結構和嵌入式永磁轉子結構的電機呈現,分割式鐵芯結構工藝在日本的運用使永磁無刷
伺服電機的生產完成了高功率、大批量和自動化,并引起國內廠家的研討